
Mechatronics Engineering department
Mechatronics is the field behind the 'Smart Products and Systems' that increasingly dominate many aspects of our lives. It intersects mechanical, electrical, and computer engineering and it combines sensors, software, and motors to create innovative, amazing new devices. Check out UC's Mechatronics Engineering department.
Mechatronics is the field behind the “Smart Products and Systems” that increasingly dominate many aspects of our lives. It sits at the intersection of mechanical, electrical, and computer engineering and combines sensors, software, and motors to create innovative and amazing new devices.
These mechatronic systems can be found manipulating the smallest bits of matter, in spacecraft, as well as throughout your home and town. From smart phones and TVs to smart energy grids to smart cars and smart medical care and devices. They are everywhere you look, making life better, greener, healthier, more productive, and more interesting.
Our graduates are shaping the future in a wide range of creative roles all over the world. Where could Mechatronics Engineering take you? What cool new things will you develop as a Mechatronics Engineer?
We use RoboDK for simulation and offline programming of industrial robots
-
Study Mechatronics Engineering
Mechatronics is the efficient, effective integration of mechanical, electronic, and computer systems. This degree emphasises synergistic use of precision engineering, control theory, computer science, maths, and sensor technology to design enhanced/'smart' products, processes, and systems. Find out about studying Mechatronics Engineering at UC.

-
Study Mechatronics Engineering
Mechatronics is the efficient, effective integration of mechanical, electronic, and computer systems. This degree emphasises synergistic use of precision engineering, control theory, computer science, maths, and sensor technology to design enhanced/'smart' products, processes, and systems. Find out about studying Mechatronics Engineering at UC.
-
Study Mechatronics Engineering
-
Mechatronics research
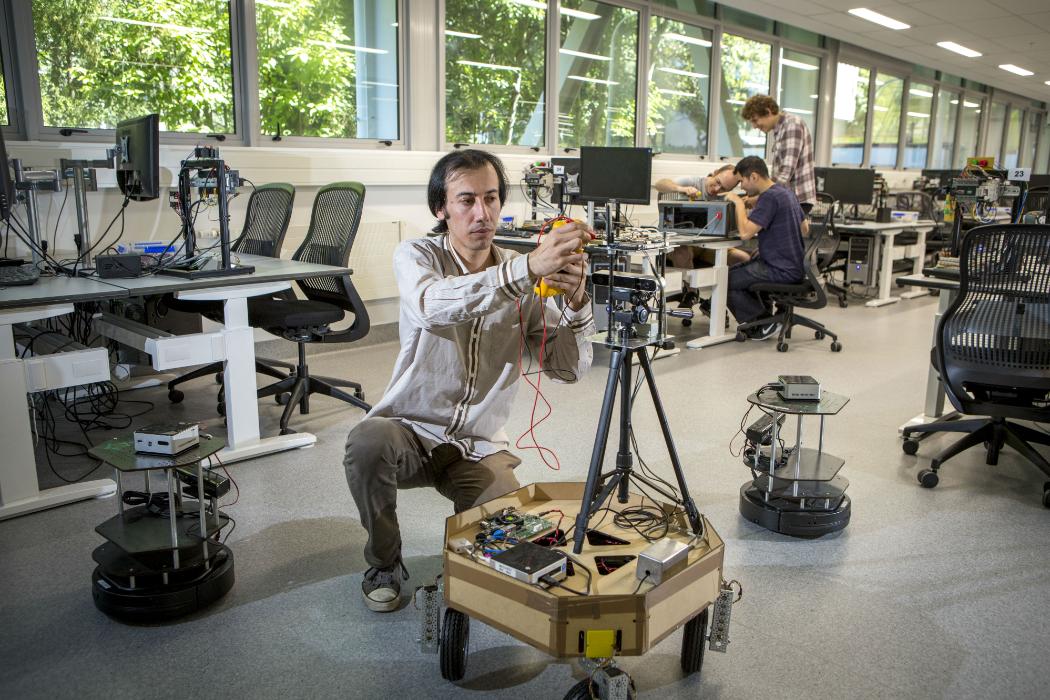
The Mechatronics, Robotics & Control Laboratory has developed some of the world’s most unique mechatronics and robotic systems. These include various mobile robots, advanced sensors and actuators, and state-of-art control prototyping systems such as dSpace, MatLab, and LabView. Learn more about mechatronics research at UC.
-
Mechatronics research
The Mechatronics, Robotics & Control Laboratory has developed some of the world’s most unique mechatronics and robotic systems. These include various mobile robots, advanced sensors and actuators, and state-of-art control prototyping systems such as dSpace, MatLab, and LabView. Learn more about mechatronics research at UC.
-
Mechatronics research